RT 060 Sistema de Treino Controlo de Posição, HSI Equipamento Didáctico Equipamento de Treino Vocacional Controlo de Processo Treinador
Fundamentos de engenharia de controlo utilizando o exemplo de um sistema de controlo de posição com comportamento integral
Funcionalidades
- relações básicas de engenharia de controlo utilizando o exemplo de um sistema controlado por posição
- controlador de software configurável e parametrizável com funções abrangentes
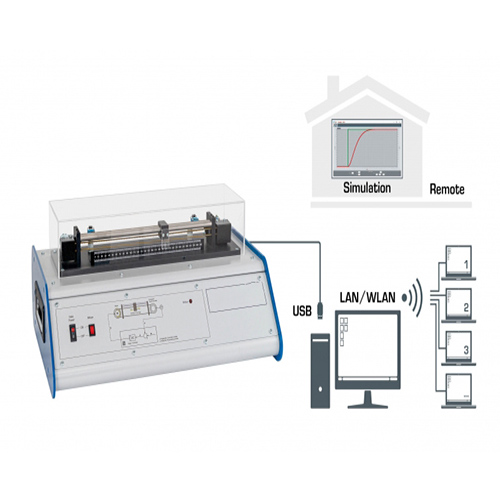
- preparação de experiências e simulação de software para aprendizagem remota
- as experiências podem ser seguidas e analisadas na rede local
Objetivos de aprendizagem/experiências
- fundamentos da engenharia de controlo utilizando o exemplo de um sistema controlado por posição
- resposta de malha de controlo aberta
- sistema controlado sem feedback
- efeitos de diferentes parâmetros e métodos do controlador na resposta do sistema em malha fechada
- otimização do controlador através da alteração dos parâmetros do controlador: Kp, Tn, Tv
- registo de respostas de passo: manipulação de passo variável e passo de valor de referência
- manipular limitação de variáveis e efeito no sistema de controlo
- simulação de software de diferentes sistemas controlados (P, I, PT1, PT2)
- comparação de diferentes parâmetros do sistema controlado
- software específico para toda a série de dispositivos
- controlador: manual, operação manual não controlada, controlador contínuo, controlador de dois ou três pontos
- programador para as suas próprias progressões de valores de referência
- registo de dependências de tempo
- aprendizagem remota: simulação de software em qualquer número de postos de trabalho
Especificação
[1] controlo de posição: sistema controlado típico
[2] sistema controlado: corrediça móvel com calha linear
[3] variável controlada: posição do slide em movimento
[4] elemento de medição: codificador rotativo (potenciómetro multi-voltas) como sensor de posição
[5] O controlador de software pode ser configurado e parametrizado como P, PI, PID e controlador de comutação
[6] atuador: motor


[7] balança de aço para observação da posição
[8] capa protetora transparente sobre a configuração experimental
[9] 2 microinterruptores para desligamento da posição final
[10] Simulação de software: vários sistemas controlados
[11] software: opção para ligar qualquer número de estações de trabalho externas na rede local para acompanhar e analisar a experiência
[12] preparação de experiências e simulação de software em qualquer número de estações de trabalho para aprendizagem remota
[13] software com funções de controlo e aquisição de dados via USB no Windows 10
[14] materiais instrucionais multimédia online no Media Center
Dados técnicos
Motor
- tensão de funcionamento: 12VDC
- relação de transmissão: i=50
- velocidade: 85min-1
- binário: 200Nmm
Codificador rotativo: potenciómetro multivoltas
máx. velocidade de deslocação: 45mm/s
Escala em aço: 0...300mm
O controlador de software pode ser configurado e parametrizado como P, PI, PID e controlador de comutação
Faixas de medição
- deslocamento: máx. 300 mm
230 V, 50 Hz, 1 fase
230 V, 60 Hz, 1 fase
120 V, 60 Hz, 1 fase
UL/CSA opcional
CxLxA: 600x450x280mm
Peso: aprox. 20 kg