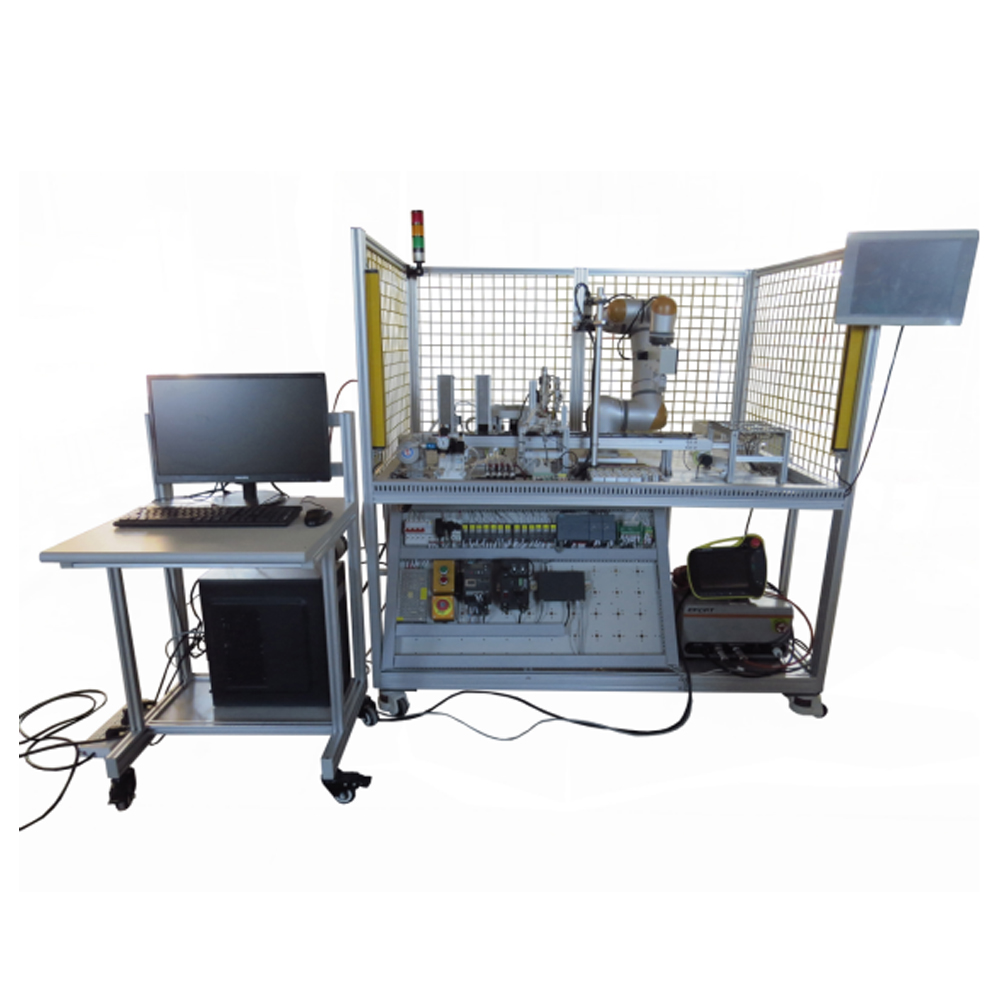
Braço robótico colaborativo de 6 eixos com câmera e garra Equipamento de treinamento vocacional Equipamento de treinamento mecatrônico
Item número.: AFM012R
Braço robótico colaborativo de 6 eixos com câmera e garra Equipamento de treinamento vocacional Equipamento de treinamento mecatrônico